

*Updated note (8 Sept 2016): Z-84 V2+ (V2 PLUS) data have been added into the article. Some data of V2 may not be applicable or already outdated. The V2+ (PLUS) is an upgrade version of existing V2.
About
This flying wing is awesome, not only its small, lightweight and portable but also when compare to the size and power ratio it able to travel longer distance on small pack battery. Before you read the article below its a good idea to watch several of my UAV Wing Wing Z-84 at my Youtube video  channel to get some mind blowing glimpse of these plane in action. Go get some extra pants because the latest video might shock you. Get back here when you're done.
channel to get some mind blowing glimpse of these plane in action. Go get some extra pants because the latest video might shock you. Get back here when you're done.
So how did i ended up with a wing especially the Z-84? If you've been following my tracks for several years you guys know i hated flying wing especially as FPV...it has no rudder yaw, bank and yank feels awkward and no cockpit to get the realism of scale flying and no landing gear...cos i love to land with landing gear. Fast forward into present day which is now i'm started getting back ache, osteoporosis, arthritic feeling on my feet joint, tiredness and something you might felt when age getting close to 40's. Well i think its time to layback, relax and let's the automation do the job. FPV is tiring thing to do because standing all day in the middle of open field under the sun panning narrow beam antenna long shot towards my plane is too much for me especially this year 2016 where hot season in the tropic heats harder and i tanned really bad almost hit a stroke. I've been doing FPV for years now and time to cut some slack and let the automation do the work before i become a dried prunes...its time for autonomous flight ..the UAV (Unmanned Autonomous Vehicle). As you all know it always started with Drifter Ultralight (V5), then later the Mini RANGER 757-4 that does autonomous back few month ago, both works great! cool! but not happy with overall result despite both broke record for flying maximum distance autonomously in their respective category. You think both of this plane perfect?...i don't think so...it didn't meet my strict standard when comes to UAV build. Here's why; you guys probably noticed in the past video on both plane they have same problematic thing in common as i listed below:
- It need smooth and solid runway to take off and landing. Most of the time landing gear got stuck in the soft sand/soild and then pivot downwards face plant damaging the cameras.
- Its hard to find flat places to take-off and landing due to private own land and development. Very limited.
- Plane with long tail fin rudder (normal plane) tends to fly "crabbing' sideways (especially with tall walled fuselage) towards the head wind direction making it fly inefficiently and slowing overall speed.
- Both of these plane are big, complicated, power hungry, expensive to build and not easy to transport even by hand. Too much works to dismantle and fit inside the box for travelling.
- Both use huge monster size battery to cover distance.
- The inertial impact force of these plane when crash on the ground is huge because of the battery weight it carry.
- Both airframe doesn't not play nice with the wind, very draggy and bumpy. They can float around....and yeah they just float almost stationary...STATIONARY! sometimes not moving at all. Trust me i almost had a Drifter Ultralight that flies and hover at 0 km/h with throttle at almost 80% heavy windy day. Almost lost it to the wind.
 Then there was that Z-84 buzzing fast at our club airfield later year end 2012, very annoying high pitch little bugger but very interesting racer indeed can be both substitute as park size racer with buddies or glide/slope soaring whole day at the beach. I'm surprise despite our club member throttle max for more than 15 minutes all over places it still have some juice left at 11.3v on 2200mah 3s li-po pack at the end of their session, very efficient indeed. Back in those days i wasn't put to much attention on it because most of my FPV preferred something with cockpit like view, scale type planes or a glider with hard assumption they are better than of that Z-84. 4 years have passed, FPV thing is already something old and tiresome for me. Already build lots of UAV type automation this year and still thirst for high efficiency platform. Then going back to the club field spotted that little fast bugger again zipping around with extra juice left in the tank......hmmmm? hey! why not! Let's try experimenting on Z-84 lets see what this little plane could offer. Started with old junk second hand Z-84 kit and then progressed with second new Z-84 built. I have successfully pushed this title little wing to its maximum efficiency with little amount of resources and budget. Have already accumulated handful of proven video that this little lightweight flying wing at 845mm wingspan successfully beaten overall performance of a bigger size long range FPV/UAV platform in the market. On 16th Sept 2016 it has made astounding record for flying up to 72km mileage of autonomous flight on a single pack of small 3500mah 4s Li-on pack clocked flight trip per-session at 92 minutes (1 hour 32 minutes) as published in my youtube channel. The Z-84 was an instant hit in my list. Guess you never judge something based on the cover of a book! The Z-84 platform was the holy grail of mini/micro size lightweight and portable fix wing drone without burning a hole in the pocket.
Then there was that Z-84 buzzing fast at our club airfield later year end 2012, very annoying high pitch little bugger but very interesting racer indeed can be both substitute as park size racer with buddies or glide/slope soaring whole day at the beach. I'm surprise despite our club member throttle max for more than 15 minutes all over places it still have some juice left at 11.3v on 2200mah 3s li-po pack at the end of their session, very efficient indeed. Back in those days i wasn't put to much attention on it because most of my FPV preferred something with cockpit like view, scale type planes or a glider with hard assumption they are better than of that Z-84. 4 years have passed, FPV thing is already something old and tiresome for me. Already build lots of UAV type automation this year and still thirst for high efficiency platform. Then going back to the club field spotted that little fast bugger again zipping around with extra juice left in the tank......hmmmm? hey! why not! Let's try experimenting on Z-84 lets see what this little plane could offer. Started with old junk second hand Z-84 kit and then progressed with second new Z-84 built. I have successfully pushed this title little wing to its maximum efficiency with little amount of resources and budget. Have already accumulated handful of proven video that this little lightweight flying wing at 845mm wingspan successfully beaten overall performance of a bigger size long range FPV/UAV platform in the market. On 16th Sept 2016 it has made astounding record for flying up to 72km mileage of autonomous flight on a single pack of small 3500mah 4s Li-on pack clocked flight trip per-session at 92 minutes (1 hour 32 minutes) as published in my youtube channel. The Z-84 was an instant hit in my list. Guess you never judge something based on the cover of a book! The Z-84 platform was the holy grail of mini/micro size lightweight and portable fix wing drone without burning a hole in the pocket.

Model specification & setup
Airframe type: Flying wing
Branding/Manufacturer: -
Model name variant: Wing Wing Z-84
Material build: EPO foam (Extremely durable, even you try to smash it to pieces and glue back it still fly like new.)
Wingspan: 845mm
Length: 405mm
Stock airframe weight: 300 gram (That's what manufacturer says)
Full FPV/UAV flying weight: 410gram (for V1 build) / 390gram (For V2 build) / 430gram (For V2+ build)
Elevon: 2x 9g servo analog MG
ESC: 18A TURNIGY Plush (V1 build) or 12A TURNIGY Plush (V2 build)
Motor: AX 1806N 2100KV
External BEC: 3A/5V (Micro size board)
Propeller: Stock 2 blade 5"x3 GWS (V2 build) or 6"x3 GWS (V1 build)
Radio receiver: Frsky telemetry 8ch
Radio receiver antenna: Stock
Battery: LG MJ1 NRI 18560 Li-on (3500mah per-cell) 3500mah 3s1p 10A **started using this on 2nd mission. However Z-84 V2+ uses 4s Li-on on starting 28 Aug 2016.
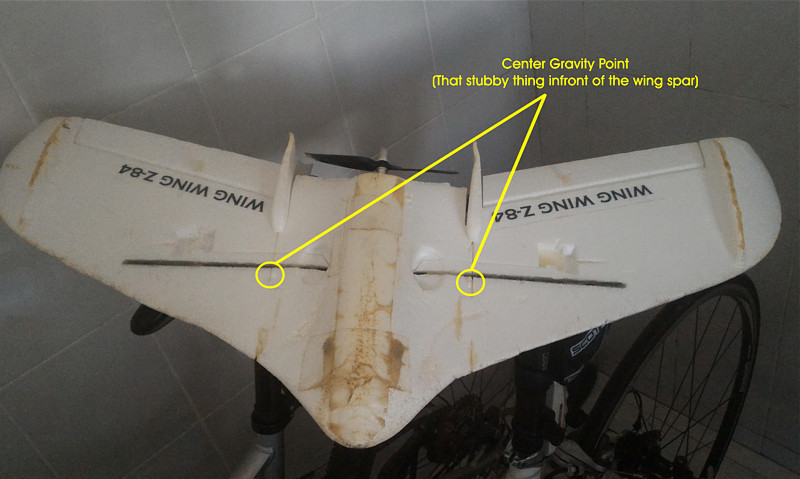
Center Gravity: There's a stubby little protruding foam before the main carbon wing spar...check the CG picture below article..read on.

My DIY UAV specification
As on date 22 August 2016 there are 2x UAV Wing Wing Z-84 was build and active as published in my Youtube channel both have slightly different hardware configuration and performance but later build (V2) are improvement over V1
Specification #1 (Version 1) "The Prototype" with FPV and UAV capable.
 Camera HD (main): 808 #16 v2 (with live video output)
Camera HD (main): 808 #16 v2 (with live video output)
Flight Control board: Mini APM 3.1 + mini GPS Ublox 7N (Uses Arduplane Version 3.4 firmware)
OSD: Micro MinimOSD
APM radio telemetry: mini 3DR radio telemetry (Only connected via connector when uploading on configure using Mission Planner. Detached before flight)
Voltage + Current sensor: 3DR power module 2-6s
Video transmitter: SKYZONE 5.8ghz 200mw
Video antenna: Stock omni
Battery: Shared with main.
Full flying weight: 410gram
Specification #2 (Version 2) Full UAV specification for autonomous robotic flight. There for no FPV was build in.
 Camera HD (main): RUNCAM HD F2.8
Camera HD (main): RUNCAM HD F2.8
Flight Control board: APM Mini Pro + mini GPS Ublox 7N (Uses Arduplane Version 3.4 firmware)
APM radio telemetry: mini 3DR radio telemetry + halfwave di-pole antenna
Voltage + Current sensor: 3DR power module 2-6s
Battery: Shared with main.
Full flying weight: 390gram (V2)/ 420gram (V2+: uses 4s Li-On)

Building
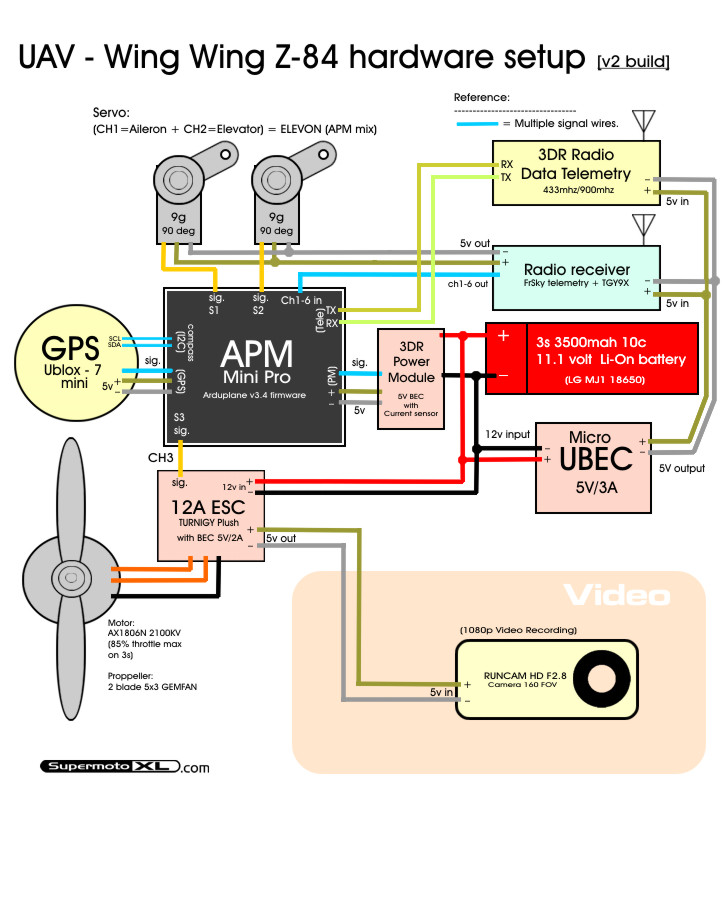
Its easy to build, placing all the required hardware inside Z-84 because the cockpit cavity is big wide open. Most micro size hardware such as APM power module and mini GPS module partially embedded inside most thick/beefy side inner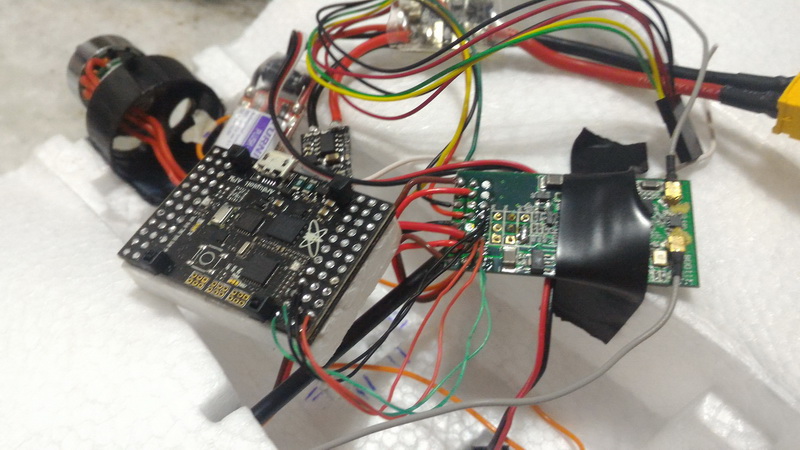 wing chord (behind the carbon wing spar) closer to wing spar to make use of available space and get the CG right, this requires me to dig out some foam to make cavity to place the devices. The APM Mini PRO board located in the middle of the body cavity floor between the main carbon wing spar and motor mounting and padded using less dense foam for absorbing vibration from nearby motor and enough to let few air into onboard barometer for pressure sensing . Anything in front of carbon wing spar is used to put battery and camera since these items are most heaviest part of the hardware on plane, the other hardware placed behind the carbon wing spar helps to counter the front weight.
wing chord (behind the carbon wing spar) closer to wing spar to make use of available space and get the CG right, this requires me to dig out some foam to make cavity to place the devices. The APM Mini PRO board located in the middle of the body cavity floor between the main carbon wing spar and motor mounting and padded using less dense foam for absorbing vibration from nearby motor and enough to let few air into onboard barometer for pressure sensing . Anything in front of carbon wing spar is used to put battery and camera since these items are most heaviest part of the hardware on plane, the other hardware placed behind the carbon wing spar helps to counter the front weight.
Oh hold on a second! You think by snapping those servo wire plug/connector into the pin socket, RP-SMA, SMA and other connectors, bulk wires and stuff will to the job perfectly to get the plane flying? Of course it will fly! It works when you connected at right port!.....Wrong! You came here to seek miracle and knowledge to achieve long range flight with incredible efficiently just like in those video which led you here. There lots of people flying FPV/UAV and stuff all over the world, as seen on Youtube, forum and places but can't even go far with max amount hours of flight time and distance per battery pack even they get the right hardware. They spent so much money, time and rants but overlook matters conderning their build. That is because most people overlooked most important factor that determines the success of long range flight: THE WEIGHT FACTOR!. Go back to my Wing Wing Z-84 photo gallery somewhere at the gallery section and check tonnes of photo i dumped 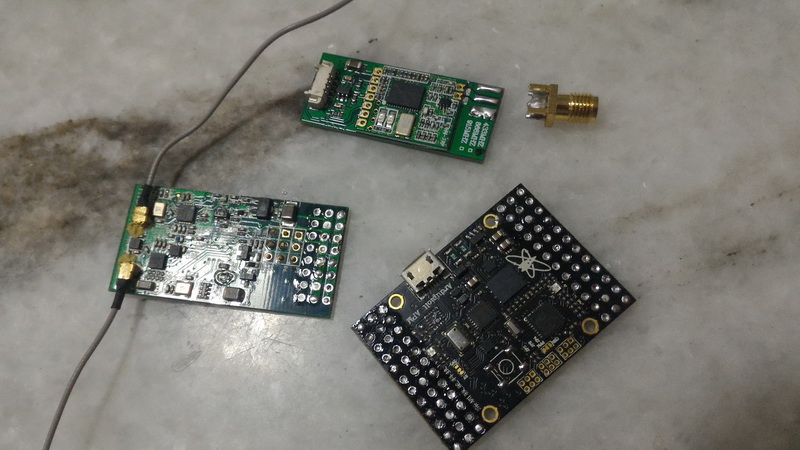 in...did you notice anything strange? Yes! pieces of flat bold PCB board...pin-less, no plugs, short thin wires/cables, no screws, no antennas connector, no bulky casing, no plastics, ultra tiny ESC and tiny BEC and other lightweight stuff. I even replace the stock carbon wing spar with another lighter carbon rods. I de-solder the heavy plug and pins out from the circuit boards because those stuff is heavy. I remove screws on servo..i did..suicidal yeah? Wires are cut to exact precision length just enough to connect to each hardwares, antenna are solder rather than interface via plug and other weight saving works. The results i get clean spacious hardware layout on Z-84 nicely embedded on the foam and reduce the weight by 2x fold which give me 390 gram of flying weight (the V1 was 410gram..bah!). Which is why i can easily hand launch it like a cotton....oh you didn't see it?..go watch that video again! So as said, you'll need extra soldering skills and some effort to remove those weight off from each components that need to be installed on Z-84, by keeping the weight down to extreme minimal you're helping to reduce the thrust loading on the motor/prop throttle. The chosen combo of 12A esc, AX1806 2100KV motor and 5"x3 prop have only effective thrust ratio between 250~390gram, so i have to shed the weight at bare minimal to get that efficiency so that overall flight thrust only consume below 2A average 53% throttle. And don't forget aerodynamics and airframe drag play extra role too but weight factor contribute 60% of overall flight efficiency success. Got that? If you don't have that soldering skill and wanted to max out over 50km mileage on small battery then turn around go get some soldering lesson....because i've receive too many people asking how to solder. I learn how to solder back in the early 80's, there's no internet reference...just hold that boiling hot metal soldering rod 240V/60W power and pray. Well if you know how to solder then lets continue with my article.
in...did you notice anything strange? Yes! pieces of flat bold PCB board...pin-less, no plugs, short thin wires/cables, no screws, no antennas connector, no bulky casing, no plastics, ultra tiny ESC and tiny BEC and other lightweight stuff. I even replace the stock carbon wing spar with another lighter carbon rods. I de-solder the heavy plug and pins out from the circuit boards because those stuff is heavy. I remove screws on servo..i did..suicidal yeah? Wires are cut to exact precision length just enough to connect to each hardwares, antenna are solder rather than interface via plug and other weight saving works. The results i get clean spacious hardware layout on Z-84 nicely embedded on the foam and reduce the weight by 2x fold which give me 390 gram of flying weight (the V1 was 410gram..bah!). Which is why i can easily hand launch it like a cotton....oh you didn't see it?..go watch that video again! So as said, you'll need extra soldering skills and some effort to remove those weight off from each components that need to be installed on Z-84, by keeping the weight down to extreme minimal you're helping to reduce the thrust loading on the motor/prop throttle. The chosen combo of 12A esc, AX1806 2100KV motor and 5"x3 prop have only effective thrust ratio between 250~390gram, so i have to shed the weight at bare minimal to get that efficiency so that overall flight thrust only consume below 2A average 53% throttle. And don't forget aerodynamics and airframe drag play extra role too but weight factor contribute 60% of overall flight efficiency success. Got that? If you don't have that soldering skill and wanted to max out over 50km mileage on small battery then turn around go get some soldering lesson....because i've receive too many people asking how to solder. I learn how to solder back in the early 80's, there's no internet reference...just hold that boiling hot metal soldering rod 240V/60W power and pray. Well if you know how to solder then lets continue with my article.
The CG is located in front of the carbon wing spar inline with the vertical fin, the one that have what look like stubby notch as shown in the picture below.
The battery placement is located in the front nose cavity after the wing spar in top. The front cavity for battery placement after the wing spar can hold up to extra 210gram (2200mah 3s battery li-po) + 17 gram (808 #16 HD camera) to get the CG right with 2 click of elevator trim on my crappy V1 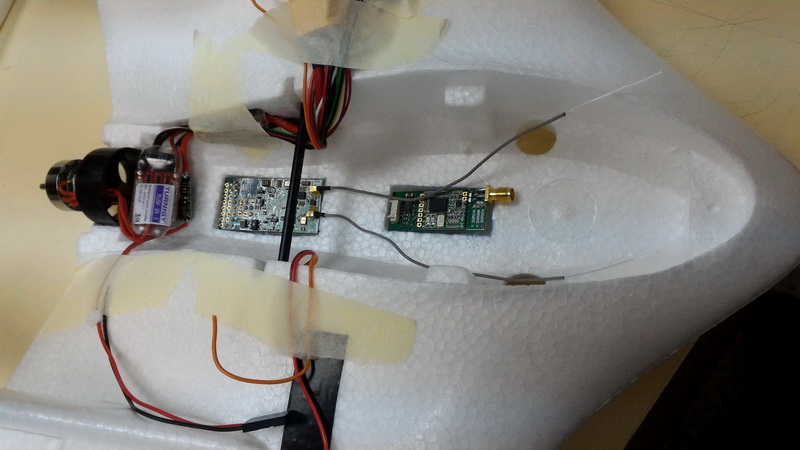 airframe. The later build which is the V2 have have frontal weight of 135gram (3500mah 3s Li-on) + 19gram (RUNCAM F2.8 weight trimmed camera). The Frsky radio receiver located embedded (dig out rectangular cavity) inside the base floor just below APM Mini Pro foam block. While the 3DR radio data telemetry module located at the battery compartment section embedded inside the Z-84 floor foam with square size fitting cavity was dig out. Both Frsky radio and 3DR data telemetry antenna spread out horizontally parallel with the wings.
airframe. The later build which is the V2 have have frontal weight of 135gram (3500mah 3s Li-on) + 19gram (RUNCAM F2.8 weight trimmed camera). The Frsky radio receiver located embedded (dig out rectangular cavity) inside the base floor just below APM Mini Pro foam block. While the 3DR radio data telemetry module located at the battery compartment section embedded inside the Z-84 floor foam with square size fitting cavity was dig out. Both Frsky radio and 3DR data telemetry antenna spread out horizontally parallel with the wings.
Most signal wires connected between each hardware such as receiver to APM fc, GPS tx/rx and other signal requirement have been replace with super thin 1mm wiring acquired from strands of LOGITECH mouse cabling just to save weight. Later revision, the USB plug on APM fc and RUNCAM HD was also removed to save weight permanently and will have no chances to update via USB port except via wireless telemetry on APM and micro SD card method for RUNCAM.
AX1806N 2100KV motor have 3 hole mounting only so you will need some improvised method to mount it to Z-84 screw 4 hole mount. Usually my method involve steel/copper tie-in + single screw bolt to lock into the mount. The motor also need to to 'balancing' since the metal can bell magnet wobble a lot during high RPM rotation as seen from my early Z-84 video clip, a dab of hard epoxy glue will solve the problem around the bell can surface.
Work checklist:
UAV building level difficulty/rating: Easy (9/10)
UAV flight controller setup (APM): Advanced
Building hours required: 18 hours
On field tuning hours required: 1 hours (Stick bashing "Auto tune" recquired)
Skill required: Soldering/Foam cutting and ARDUINO programming for APM based hardware.
Critical issues during installation: Keeping the weight to most minimal (Acceptable weight = 410gram, Optimal ideal weight = 390gram)
Required additional mods/must do improvement: Beef up the motor mounting/solid reinforcement + re-glue all control hinges
Tips to remove the weight: Remove/unsolder all those servo connectors, pins, RP-SMA/SMA connector, heavy plugs and unnecessary etc to reduce the weight...except the battery plug you need it. If you don't do this then its hard to achieve 390gram full flying weight.
APM parameters lists:
Here's the list of parameters used by UAV WING WING Z-84 (Version 2) build. All the parameters are based on Arduplane V3.4 firmware. Some lines of parameter have been removed because parameters setting such as compass, acc and gyro sensors are very much based on "locality" factor setting which you need to do calibrate it by yourself. So copy the below parameter manually.
*Note:
- Assume you use the same hardware a setup as V2 build
- Different radio transmitter mode/setup requires different radio channel calibration range/PWM signal and flight mode.
- This parameter optimal for Wing Wing Z-84 with full flying weight between 390gram~410gram. Different weight, CG, motor combo power, or different servo performance/throw requires extra tuning.
========================================================
Firmware: ARDUPLANE v3.4 only
========================================================
| ACRO_LOCKING,0 ACRO_PITCH_RATE,180 ACRO_ROLL_RATE,180 AHRS_COMP_BETA,0.1 AHRS_GPS_GAIN,1 AHRS_GPS_MINSATS,6 AHRS_GPS_USE,1 AHRS_ORIENTATION,0 AHRS_RP_P,0.2 AHRS_TRIM_X,-0.02656116 AHRS_TRIM_Y,-0.0274512 AHRS_TRIM_Z,0 AHRS_WIND_MAX,0 AHRS_YAW_P,0.2 ALT_CTRL_ALG,0 ALT_HOLD_FBWCM,0 ALT_HOLD_RTL,8000 ALT_MIX,1 ALT_OFFSET,0 ARMING_CHECK,0 ARMING_REQUIRE,0 ARMING_RUDDER,0 ARSPD_AUTOCAL,0 ARSPD_ENABLE,0 ARSPD_FBW_MAX,19 ARSPD_FBW_MIN,10 ARSPD_OFFSET,890.8737 ARSPD_PIN,0 ARSPD_RATIO,1.9936 ARSPD_SKIP_CAL,0 ARSPD_TUBE_ORDER,2 ARSPD_USE,0 AUTO_FBW_STEER,0 AUTOTUNE_LEVEL,6 BATT_AMP_OFFSET,0 BATT_AMP_PERVOLT,18.0018 BATT_CAPACITY,3500 BATT_CURR_PIN,12 BATT_MONITOR,4 BATT_VOLT_MULT,10.1 BATT_VOLT_PIN,13 BATT2_AMP_OFFSET,0 BATT2_AMP_PERVOL,17 BATT2_CAPACITY,3300 BATT2_CURR_PIN,12 BATT2_MONITOR,0 BATT2_VOLT_MULT,10.1 BATT2_VOLT_PIN,13 BRD_SERIAL_NUM,0 CAM_DURATION,10 CAM_SERVO_OFF,1100 CAM_SERVO_ON,1300 CAM_TRIGG_DIST,0 CAM_TRIGG_TYPE,0 INVERTEDFLT_CH,0 KFF_RDDRMIX,0 KFF_THR2PTCH,0 LAND_DISARMDELAY,20 LAND_FLAP_PERCNT,0 LAND_FLARE_ALT,3 LAND_FLARE_SEC,2 LAND_PITCH_CD,0 LEVEL_ROLL_LIMIT,5 LIM_PITCH_MAX,2500 LIM_PITCH_MIN,-3000 LIM_ROLL_CD,4500 LOG_BITMASK,0 MAG_ENABLE,1 MIN_GNDSPD_CM,0 MIS_RESTART,0 MIS_TOTAL,13 MIXING_GAIN,0.5 NAV_CONTROLLER,1 NAVL1_DAMPING,0.75 NAVL1_PERIOD,18 |
PTCH2SRV_D,0.04309839 PTCH2SRV_FF,0 PTCH2SRV_I,0.04335644 PTCH2SRV_IMAX,3000 PTCH2SRV_P,0.5746452 PTCH2SRV_RLL,1 PTCH2SRV_RMAX_DN,75 PTCH2SRV_RMAX_UP,75 PTCH2SRV_TCONST,0.45 RALLY_INCL_HOME,0 RALLY_LIMIT_KM,5 RALLY_TOTAL,0 RC1_DZ,30 RC1_MAX,1917 RC1_MIN,1067 RC1_REV,-1 RC1_TRIM,1495 RC10_DZ,0 RC10_FUNCTION,0 RC10_MAX,1900 RC10_MIN,1100 RC10_REV,1 RC10_TRIM,1500 RC11_DZ,0 RC11_FUNCTION,0 RC11_MAX,1900 RC11_MIN,1100 RC11_REV,1 RC11_TRIM,1500 RC2_DZ,30 RC2_MAX,1919 RC2_MIN,1070 RC2_REV,-1 RC2_TRIM,1504 RC3_DZ,30 RC3_MAX,1919 RC3_MIN,1069 RC3_REV,1 RC3_TRIM,1069 RC4_DZ,30 RC4_MAX,1919 RC4_MIN,1070 RC4_REV,1 RC4_TRIM,1491 RC5_DZ,0 RC5_FUNCTION,0 RC5_MAX,1919 RC5_MIN,1068 RC5_REV,1 RC5_TRIM,1071 RC6_DZ,0 RC6_FUNCTION,0 RC6_MAX,1834 RC6_MIN,1070 RC6_REV,1 RC6_TRIM,1834 RC7_DZ,0 RC7_FUNCTION,0 RC7_MAX,1497 RC7_MIN,1488 RC7_REV,1 RC7_TRIM,1497 RC8_DZ,0 RC8_FUNCTION,0 RC8_MAX,1497 RC8_MIN,1488 RC8_REV,1 RC8_TRIM,1497 |
RCMAP_PITCH,2 RCMAP_ROLL,1 RCMAP_THROTTLE,3 RCMAP_YAW,4 RELAY_DEFAULT,0 RELAY_PIN,13 RELAY_PIN2,-1 RELAY_PIN3,-1 RELAY_PIN4,-1 RLL2SRV_D,0.05059387 RLL2SRV_FF,0 RLL2SRV_I,0.063927 RLL2SRV_IMAX,3000 RLL2SRV_P,0.6745849 RLL2SRV_RMAX,75 RLL2SRV_TCONST,0.45 RNGFND_LANDING,0 RSSI_PIN,-1 RSSI_RANGE,5 RST_MISSION_CH,0 RST_SWITCH_CH,0 RTL_AUTOLAND,0 RUDDER_ONLY,0 SCALING_SPEED,15 SCHED_DEBUG,0 SERIAL0_BAUD,115 SERIAL1_BAUD,57 SERIAL1_PROTOCOL,1 SERIAL2_BAUD,57 SERIAL2_PROTOCOL,1 SERIAL3_BAUD,38 SERIAL3_PROTOCOL,5 SERIAL4_BAUD,38 SERIAL4_PROTOCOL,5 SKIP_GYRO_CAL,0 SR0_EXT_STAT,2 SR0_EXTRA1,6 SR0_EXTRA2,6 SR0_EXTRA3,2 SR0_PARAMS,10 SR0_POSITION,2 SR0_RAW_CTRL,2 SR0_RAW_SENS,2 SR0_RC_CHAN,2 SR1_EXT_STAT,2 SR1_EXTRA1,5 SR1_EXTRA2,2 SR1_EXTRA3,3 SR1_PARAMS,10 SR1_POSITION,2 SR1_RAW_CTRL,2 SR1_RAW_SENS,2 SR1_RC_CHAN,5 STAB_PITCH_DOWN,2 STALL_PREVENTION,1 STEER2SRV_D,0.005 STEER2SRV_FF,0 STEER2SRV_I,0.2 STEER2SRV_IMAX,1500 STEER2SRV_MINSPD,1 STEER2SRV_P,1.8 STEER2SRV_TCONST,0.75 STICK_MIXING,1 SYS_NUM_RESETS,48 SYSID_MYGCS,255 SYSID_SW_TYPE,0 SYSID_THISMAV,1 |
TECS_CLMB_MAX,5 TECS_HGT_OMEGA,3 TECS_INTEG_GAIN,0.1 TECS_LAND_ARSPD,-1 TECS_LAND_DAMP,0.5 TECS_LAND_PMAX,10 TECS_LAND_SINK,0.25 TECS_LAND_SPDWGT,1 TECS_LAND_TCONST,2 TECS_LAND_THR,-1 TECS_PITCH_MAX,0 TECS_PITCH_MIN,0 TECS_PTCH_DAMP,0 TECS_RLL2THR,10 TECS_SINK_MAX,5 TECS_SINK_MIN,2 TECS_SPD_OMEGA,2 TECS_SPDWEIGHT,1 TECS_THR_DAMP,0.5 TECS_TIME_CONST,5 TECS_VERT_ACC,7 TELEM_DELAY,0 THR_FAILSAFE,0 THR_FS_VALUE,950 THR_MAX,68 THR_MIN,0 THR_PASS_STAB,0 THR_SLEWRATE,100 THR_SUPP_MAN,0 THROTTLE_NUDGE,1 TKOFF_FLAP_PCNT,0 TKOFF_ROTATE_SPD,0 TKOFF_TDRAG_ELEV,0 TKOFF_TDRAG_SPD1,0 TKOFF_THR_DELAY,2 TKOFF_THR_MAX,0 TKOFF_THR_MINACC,0 TKOFF_THR_MINSPD,0 TKOFF_THR_SLEW,0 TRIM_ARSPD_CM,1400 TRIM_AUTO,0 TRIM_PITCH_CD,0 TRIM_RC_AT_START,1 TRIM_THROTTLE,57 VTAIL_OUTPUT,0 WP_LOITER_RAD,60 WP_MAX_RADIUS,0 WP_RADIUS,90 YAW2SRV_DAMP,0 YAW2SRV_IMAX,1500 YAW2SRV_INT,0 YAW2SRV_RLL,1 YAW2SRV_SLIP,0 |
========================================================

UAV flight characteristic and performance
What made me smile when i first time maiden this plane with fully loaded UAV spec onboard? Like any other planes during its maiden flight first thing you  always need to do is always do some manual trimming on the elevon servo then some "Auto tuning" mode when you're on APM. But on Z-84 there almost no trimming involve, it just flew straight off from my hand and that's it. Flew nice without trim and i can concentrate on auto tune mode! Sweet! It flies like on rails! Let me remind you my first maiden was on fully abused Franken, lumpy and retarded hobo looking Z-84 (first build V1) which i bought second hand from my friend garage that had smelled like cat urine on it and bunch of bruises with hot glue patches, but it flies straight out of my hands as if it came out new from the box like factory tuned!..that was on my franken 410gram build on 100% second hard crappy parts i dig from from planes graveyard...and yes using a relic old mini APM v3.1 (but do not confuse with APM MINI PRO because that one is on latest build). On my second build (390gram) and first maiden there no need explanation....tonnes of smiles on my face not even Kodak moment have enough space to fit my smiley picture in the frame...and of course the second build doesn't have FPV at all just autonomous robotic flight.
always need to do is always do some manual trimming on the elevon servo then some "Auto tuning" mode when you're on APM. But on Z-84 there almost no trimming involve, it just flew straight off from my hand and that's it. Flew nice without trim and i can concentrate on auto tune mode! Sweet! It flies like on rails! Let me remind you my first maiden was on fully abused Franken, lumpy and retarded hobo looking Z-84 (first build V1) which i bought second hand from my friend garage that had smelled like cat urine on it and bunch of bruises with hot glue patches, but it flies straight out of my hands as if it came out new from the box like factory tuned!..that was on my franken 410gram build on 100% second hard crappy parts i dig from from planes graveyard...and yes using a relic old mini APM v3.1 (but do not confuse with APM MINI PRO because that one is on latest build). On my second build (390gram) and first maiden there no need explanation....tonnes of smiles on my face not even Kodak moment have enough space to fit my smiley picture in the frame...and of course the second build doesn't have FPV at all just autonomous robotic flight.
 Let's talk about the performance of the first Z-84 build (v1) dub aka the 'PROTOTYPE', that one has an FPV setup; video transmitter, Miniosd and live video out camera on 720p recording as mentioned earlier about the specification on the top page. Second hand abused and Frankenstein looking airframe at 410gram of full flying weight it perform nicely at 31km drawn down at 10.1v per-pack but consume at 3.0~3.2A current at cruise mode which is not really ideal for long range flight plus it was plague with motor and prop vibration problem and again that smells of cat urine emanating in my hangar. It flies well with minimal speed of 17km/h before stall and top speed of 82km/h but still a power hogging little machine. There are 4x components inside the V1 that blood sucking overall fuel tank of Z-84 and these are the Skyzone 200mw video transmitter (waste too much heat), micro MinimOSD (amp hogging and hot) ,6x3 prop (very torquey but overloading the small AX1806N 2100KV motor) and lastly overkill 18A Turnigy Plush ESC (which is heavy and also power consuming internal BEC). The other 5% factor comes from overly over hot glued airframe and and less aerodynamic wing surface due to crash and bash from previous owner which is why i got the airframe cheap. I know 31km is extremely handful flight distance for a small plane like this but to seek for perfection and curiosity this leads to the second build 2 week later.
Let's talk about the performance of the first Z-84 build (v1) dub aka the 'PROTOTYPE', that one has an FPV setup; video transmitter, Miniosd and live video out camera on 720p recording as mentioned earlier about the specification on the top page. Second hand abused and Frankenstein looking airframe at 410gram of full flying weight it perform nicely at 31km drawn down at 10.1v per-pack but consume at 3.0~3.2A current at cruise mode which is not really ideal for long range flight plus it was plague with motor and prop vibration problem and again that smells of cat urine emanating in my hangar. It flies well with minimal speed of 17km/h before stall and top speed of 82km/h but still a power hogging little machine. There are 4x components inside the V1 that blood sucking overall fuel tank of Z-84 and these are the Skyzone 200mw video transmitter (waste too much heat), micro MinimOSD (amp hogging and hot) ,6x3 prop (very torquey but overloading the small AX1806N 2100KV motor) and lastly overkill 18A Turnigy Plush ESC (which is heavy and also power consuming internal BEC). The other 5% factor comes from overly over hot glued airframe and and less aerodynamic wing surface due to crash and bash from previous owner which is why i got the airframe cheap. I know 31km is extremely handful flight distance for a small plane like this but to seek for perfection and curiosity this leads to the second build 2 week later.
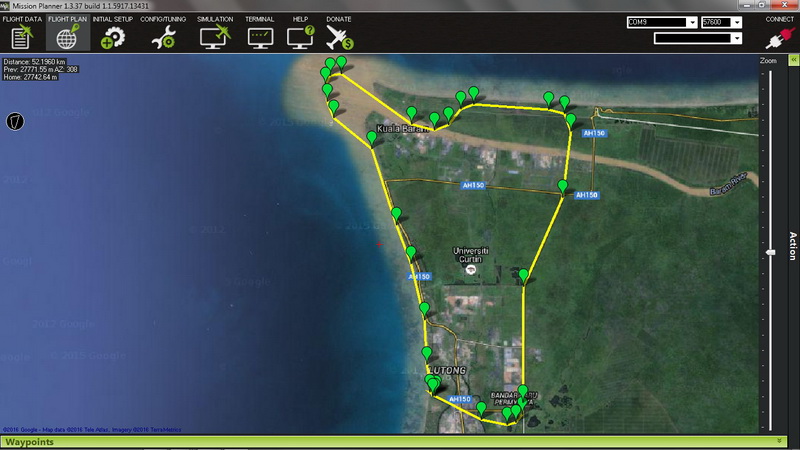
 The second build (V2) is a highly improve Z-84 build thanks to many observation, research and test flight from the Prototype V1. This build remove some unnecessary parts this includes onboard FPV equipment (live video viewing) such as MinimOSD and video transmitter to be removed permanently and replaced with low powered (mw) lightweight 3DR Radio data telemetry module to transmit the plane last minutes flight status on the ground via GCS (Ground station). Since this plane to be flow autonomously (UAV = Unmanned Autonomous Vehicle) flying robotic like flight per-loaded with waypoint for long distance flight the hardware build schematics have been simplified and reduce amount of power hogging hardware parasiting the battery
The second build (V2) is a highly improve Z-84 build thanks to many observation, research and test flight from the Prototype V1. This build remove some unnecessary parts this includes onboard FPV equipment (live video viewing) such as MinimOSD and video transmitter to be removed permanently and replaced with low powered (mw) lightweight 3DR Radio data telemetry module to transmit the plane last minutes flight status on the ground via GCS (Ground station). Since this plane to be flow autonomously (UAV = Unmanned Autonomous Vehicle) flying robotic like flight per-loaded with waypoint for long distance flight the hardware build schematics have been simplified and reduce amount of power hogging hardware parasiting the battery 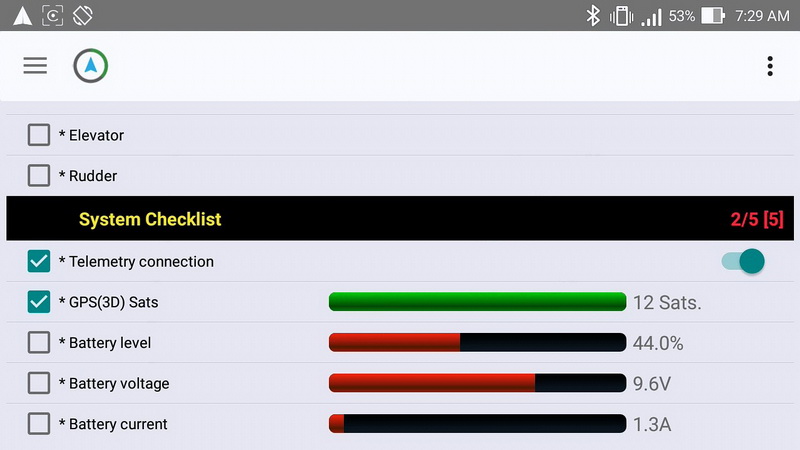 remaining power supply to overall flight system, thus saving every ounce of current to the motor to push this plane for extra miles. Overall i saved 1.5A amount of current per-session during flight unlike the old build. The results V2+ (4s) is tripple (3x) more power efficient. Thrust power ratio have been improve with the use of smaller 5"x3 prop that match the motor efficiency at 4s Li-on thus smaller props reduce 'radial' drag at the back of the plane since the delta wing more likely to cruise more at less output power. As shown on V2+ video that i published on my Youtube channel the GCS (Ground Station) Tower apps shows actual power consumption of Z-84 V2 in action; with full throttle climbing mode from 80m to 250m against headwind took range about 0.8~1.2A while at leveled cruise flight it took only between 0.2~0.7A at headwind direction. Typical percentage cruise throttle trigger by receiver PWM signal or from pilot thumb stick is at 40%, Max is at 50% which both to be used on APM autonomous throttle control. So to sum up the success of V2+ is the reduction of current power consumption helps to increase flight efficiency and range.
remaining power supply to overall flight system, thus saving every ounce of current to the motor to push this plane for extra miles. Overall i saved 1.5A amount of current per-session during flight unlike the old build. The results V2+ (4s) is tripple (3x) more power efficient. Thrust power ratio have been improve with the use of smaller 5"x3 prop that match the motor efficiency at 4s Li-on thus smaller props reduce 'radial' drag at the back of the plane since the delta wing more likely to cruise more at less output power. As shown on V2+ video that i published on my Youtube channel the GCS (Ground Station) Tower apps shows actual power consumption of Z-84 V2 in action; with full throttle climbing mode from 80m to 250m against headwind took range about 0.8~1.2A while at leveled cruise flight it took only between 0.2~0.7A at headwind direction. Typical percentage cruise throttle trigger by receiver PWM signal or from pilot thumb stick is at 40%, Max is at 50% which both to be used on APM autonomous throttle control. So to sum up the success of V2+ is the reduction of current power consumption helps to increase flight efficiency and range.

Overall V1, V2 and V2+ Z-84 plane seems to fly extremely stable than any UAV plane i ever build despite being small, if you watch and compare collection of my flight video of Z-84 against its older siblings the RANGER and Drifter flown at the same flight path you will realized the Z-84 are more stable in rough windy condition flown almost straight like on rails. you have to understand this 2 flown on small pack battery when compare to bigger size brother.
Now lets do some comparison between several existing UAV (autonomous) type build that have been running active recently as seen on my Youtube channel. You will notice the difference in weight, efficiency and power ratio between several UAV flight model that I've build.
Performance and efficiency comparison on autonomous fixed wing:
UAV(Autonomous) | Batt(mah) | Flying weight(g) | Cruise throttle(%) | Current consumption(A) | Mileage(km) | End voltage (v)
1. Drifter Ultralight v5 (960mm) | 5500mah 3s1p Li-po | 850g | 57~58% | 7~9A | 24km | 10.3v
2. Mini Ranger 757-4 (1450mm) | 10500mah 3s3p Li-on | 1380g | 53~55% | 5~6A | 55.1km | 9.6v
3. Wing Wing Z-84 v1 (845mm) | 3500mah 3s1p Li-on | 410g | 57% | 3~3.2A | 31km | 9.8v
4. Wing Wing Z-84 v2 (845mm) | 3500mah 3s1p Li-on | 390g | 40% | 1.0~1.5A | 52.1km | 9.5v
5. Wing Wing Z-84 v2+ (845mm) | 3500mah 4s1p Li-on | 430g | 40% | 0.4~0.7A | 72km | 10.0v (updated: 16 Sept 2016)
______________________________________________________________________________________________________
* Based on the above comparison the UAV build Wing Wing Z-84 v2 wins based on overall efficiency.
Requirement level, details stats and parameters:
Minimum level of VLOS flight experience required/flight-hours: Intermediate(120 hour)
Minimum level of basic UAV flight experience required/flight-hours: Intermediate (300 hour)
Nature of platform handling experience/skill required: Glider and acrobatic flight
Self leveling capability in thumbs-off stick situation without artificial stabilization: Yes
Take-off & landing difficulty: Easy
Hand launch: Yes
Max speed: 72~km/h
Cruise speed: 43~53km/h
Min speed before stall (with almost zero wind): 12.4 km/h (v1=410gram) / 9.8km/h (v2=390gram)
Cruise throttle power consumption (A): 3.0A = 50km/h (@57 throttle) for V1 build
Cruise throttle power consumption (A): 1.3A = 51km/h (@57 throttle) for V2 build
Cruise throttle power consumption (A): 0.4A = 55km/h (@40 throttle) for V2+ build
FPV flight/radius: Unlimited (given above UAV spec/setup)
Max altitude: -
Bail-out/fail safe recovery altitude limit: 10~20m
UAV safe distance range for testing: 400~600m (Open field)
High angle of attack (AOA) tolerance limit before stall: 50~60 degree.
Max bank angle at cruise speed 51km/h: 46 degree.
Ground take-off and landing thrust%: Takeoff-hand launched 10m (80%)/ Landing 30m (20~0%)
Altitude climbing power/thrust%/AOA angle: 1 sec/per-meter at 55% thrust/15 degree
360 degree turning radius clearance/holding pattern/loiter: 50m
360 barrel roll/loop acro flight: Medium (Aerobatic)
Control expo - aileron: 50% (low to high)
Control expo - elevator: 50% (low to high)
Control expo - rudder: not applicable
Control end point - aileron: 100% (low to high)
Control end point - elevator: 100% (low to high)
Control end point - rudder: not applicable
Flight time: 72~82 min on 3500mah 3s Li-On pack (12.4v full charged voltage)
Flight time: 93 min on 3500mah 4s Li-On pack (16.4v full charged voltage)
Ground spotter visibility (LOS): 300~400m
Ground spotter audible noise (LOS): 100~150m
Safety issue
 Seriously i don't see any safety problem with this little guy. The good news about the Z-84 is that there are no flight hazard, risk of stall or major damages if ground crashes occur despite being small. It is more likely to glide if power are lost provided the full flying weight stays at 390gram~420gram limit. If head-on impact against stationary ground object or should collision happen with a living object on the ground the inertial force from the impact should have been very minimal because of the lightweight characteristic of the plane and the bumper foam (EPO elastic foam) in front of the plane (assume the camera lens is located far behind the most frontal nose of the plane and the plane is at zero throttle mode). Tip stall more likely to happen if the full flying weight is around 580~680gram cruise below 20km/h speed. Should if it losses throttle power to 0% (Zero) the Z-84 more likely to level automatically and slowly glide to the ground in level manner because the remaining power from the BEC 5V enough to give last remaining power to the APM (Arduplane 3.4v firmware) flight controller and the servo to level the flight until touch down on the ground rather than directly dart-in plunge high speed like normal un-stabilized fixed wing does. In an event of GPS signal was lost the APM flight controller will trigger loiter mode leveled via onboard barometer sensor with 50m~60m radius until the GPS signal regain back lock at minimal 7 satellite.
Seriously i don't see any safety problem with this little guy. The good news about the Z-84 is that there are no flight hazard, risk of stall or major damages if ground crashes occur despite being small. It is more likely to glide if power are lost provided the full flying weight stays at 390gram~420gram limit. If head-on impact against stationary ground object or should collision happen with a living object on the ground the inertial force from the impact should have been very minimal because of the lightweight characteristic of the plane and the bumper foam (EPO elastic foam) in front of the plane (assume the camera lens is located far behind the most frontal nose of the plane and the plane is at zero throttle mode). Tip stall more likely to happen if the full flying weight is around 580~680gram cruise below 20km/h speed. Should if it losses throttle power to 0% (Zero) the Z-84 more likely to level automatically and slowly glide to the ground in level manner because the remaining power from the BEC 5V enough to give last remaining power to the APM (Arduplane 3.4v firmware) flight controller and the servo to level the flight until touch down on the ground rather than directly dart-in plunge high speed like normal un-stabilized fixed wing does. In an event of GPS signal was lost the APM flight controller will trigger loiter mode leveled via onboard barometer sensor with 50m~60m radius until the GPS signal regain back lock at minimal 7 satellite.
Pros and Cons
Here are list of Pros and Cons on WING WING Z-84 listed below which already equipped with APM for autonomous UAV spec:
Pros:
- Small, lightweight and portable. Can be hand carry anywhere, mounted on back pack or strapped on bicycle.
- Extremely cheaper to build as UAV (autonomous) flight setup. Budget around USD$260~ (approximate) assume minimal parts used.
- Made from durable EPO foam which can withstand crashes plus easy to fix if cracked.
- Smaller, foamy and less weight means less problem when crashed on ground, private property or on living things.
- Have very long duration gliding ratio noticeable during landing.
- Plane always stay naturally level during normal flight when radio control thumb stick are released to center thanks to dihedral wing tip.
- Bigger cavity to stuff in all the hardware and easy maintenance access.
- Very low wind resistance airframe = less power consumption during motor/prop thrust output. Extremely power efficient plane and travel extremely long distance when compare based on size of the airframe, weight, onboard power and thrust to weight ratio.
- Extremely easy to hand launched and belly landing. Can be launch and land at any places unlike wheeled planes.
- Almost no servo trimming needed during maiden flight if get the CG right at the first time.
- With only small lightweight Li-On pack at 3500mah 3s (12.4V) could fly between 72~82 minutes (1 hour 12 minutes ~ 1 hour 22 minutes).
Cons:
- Shorter airframe means high amount of vibration all over the airframe and might affect the onboard camera wobbling video recording. Require extremely balanced prop and motor to operate on this plane. Sponge type vibration damper required to be used between the camera and the airframe, the use rubber band to hold it in place.
- Not enough space to separate radio RF interference between RF sensitive devices such as radio receiver and 3DR data telemetry module which explained why Frsky radio TX module on 9X controller started to *beeping* near 750m~1000m and 3DR radio telemetry losing range after 2500m. So the rest of the remaining flight distance away from home base will be automated with zero radio signal.
.

Current status & flight history
As you've read before the UAV Wing Wing Z-84 no doubt the most efficient mini/micro size UAV platform ever build, now become my best "go to" fixed wing autonomous plane where ever i go and this will impact the status of UAV Drifter Ultralight V5 as urban UAV plane and more likely to be replaced with  immediate effect because Drifter UAV V5 is to heavy to be flown over populated area. Drifter UAV V5 might have second chances flying autonomously outside urban area for short range mission because it has the advantages of long range 3DR radio data transmission capability up to 15km L.O.S unlike crampy Z-84 data link. By 20th August 2016 almost 2 month into the operation the V1 have accumulated average 440km mileage and the V2 have accumulated 320km mileage both at local urban flight and outskirt of town/ forest region. Because of their size and their non-hazard weight its the only UAV drone that i have that able to fly at close range low altitude proximity between 80m~160m height safely at long distance, this is because the Z-84 are highly maneuverable and able to climb at any altitude at will unlike the big size fixed wing drone the Volantex Ranger or Drifter Ultralight V5. The Z-84 also excel at any windy condition thanks to their low resistant aerodynamic body and their onboard electronics are fully protected from wet rainy weather thanks to their airy and well ventilated cavity which all the water to pass easily than stuck inside the plane ruining/short circuit the electronics. Do take note that the critical electronics (APM, BEC, Power module, GPS and ESC) are located slightly elevated from the Z-84 floor cavity where the water might seep in, the 3DR radio module and Frsky receiver board are well sealed away from water despite embedded below the floor line thanks to balsa wood floor sealing and block of foam above the Frsky receiver. To sum up everything the Z-84 V2 have 95% and the V1 have 80% survival rate in bad wet weather when compare among all my FPV and UAV platform alike.
immediate effect because Drifter UAV V5 is to heavy to be flown over populated area. Drifter UAV V5 might have second chances flying autonomously outside urban area for short range mission because it has the advantages of long range 3DR radio data transmission capability up to 15km L.O.S unlike crampy Z-84 data link. By 20th August 2016 almost 2 month into the operation the V1 have accumulated average 440km mileage and the V2 have accumulated 320km mileage both at local urban flight and outskirt of town/ forest region. Because of their size and their non-hazard weight its the only UAV drone that i have that able to fly at close range low altitude proximity between 80m~160m height safely at long distance, this is because the Z-84 are highly maneuverable and able to climb at any altitude at will unlike the big size fixed wing drone the Volantex Ranger or Drifter Ultralight V5. The Z-84 also excel at any windy condition thanks to their low resistant aerodynamic body and their onboard electronics are fully protected from wet rainy weather thanks to their airy and well ventilated cavity which all the water to pass easily than stuck inside the plane ruining/short circuit the electronics. Do take note that the critical electronics (APM, BEC, Power module, GPS and ESC) are located slightly elevated from the Z-84 floor cavity where the water might seep in, the 3DR radio module and Frsky receiver board are well sealed away from water despite embedded below the floor line thanks to balsa wood floor sealing and block of foam above the Frsky receiver. To sum up everything the Z-84 V2 have 95% and the V1 have 80% survival rate in bad wet weather when compare among all my FPV and UAV platform alike.
Lifespan operation: 2 months (updated: 22 August 2016)
Start operation (V1 build): 11th July 2016
Start operation (V2/V2+ build): 10th August 2016
Maintenance priority check: None
Constant critical issue: None
Maintenance cost per-lifespan: None
Best trip distance per-session (V1 build) : 31km (updated on 20 May 2016)
Best trip distance per-session (V2/V2+ build) : 63.1km (updated on 8 Sept 2016)
Est. distance covered per-lifespan (V1 build): ~440km (Odo) (updated on 18 Aug 2016)
Est. distance covered per-lifespan (V2/V2+ build): ~450km (Odo) (updated on 8 Sept 2016)
Best height record: -
Best flight time record per-session (V2 build): 72min (Li-on MJ1 10,500mah 3s3p) *Ground test indicates 72min down to 9.4v where limit is 7.8v
Activity status (V1 build): Still active.
Activity status (V2?V2+ build): Still active.
Autonomous flight feature:
Just like its bigger brother the UAV Drifter V5 and Volantex Ranger, the Z-84 has lots of autonomous robotic flying capability beyond what used to be popularized as FPV flight. Pilotless unmanned tiny flying robot is a best definition to describe my Z-84 and here again the list of capability:
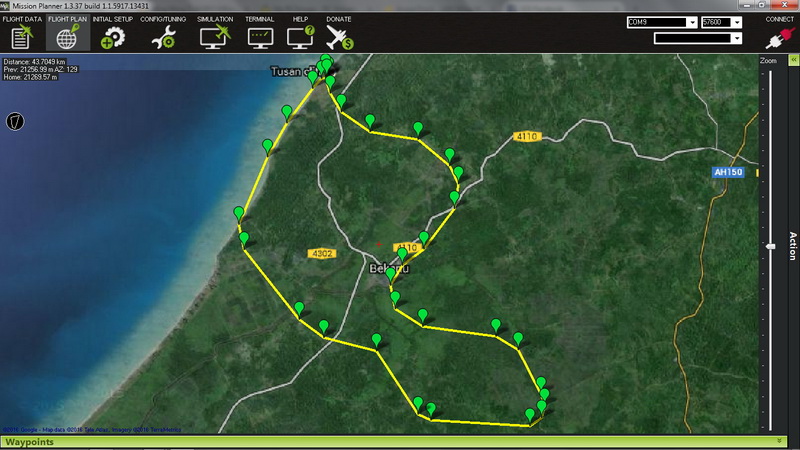
 Autonomous flight Waypoint flight: Yes, no hands flight. It flew by itself. I can also do auto take-off and landing too.
Autonomous flight Waypoint flight: Yes, no hands flight. It flew by itself. I can also do auto take-off and landing too.- Follow me: You seen it before....something you saw on my multicopter project video but i don't use it much.
- Touch to fly: I you have a gamepad you can use to fly it instead of using your aircraft radio controller else just point on your smart devices touch screen to command your flight.
- Grid flight for aerial 2D/3D mapping: I think you saw 2x samples i made on my Youtube channel.
- ROI inspection flight (Region Of Interest): Just point that area you want to explore or do aerial inspection with gimbal camera and the plane do its magical works capture the ground object in all angle.
- Servo trigger type mission: Something that trigger servo movement like dropping payload or activate camera, suitable for parcel delivery services on drones where it can land drop the package or touch 'n' go drop something that Google, Amazon and DHL drone are experimenting at the time of my writings.....yet to discover..to be continue... Open source are cool!

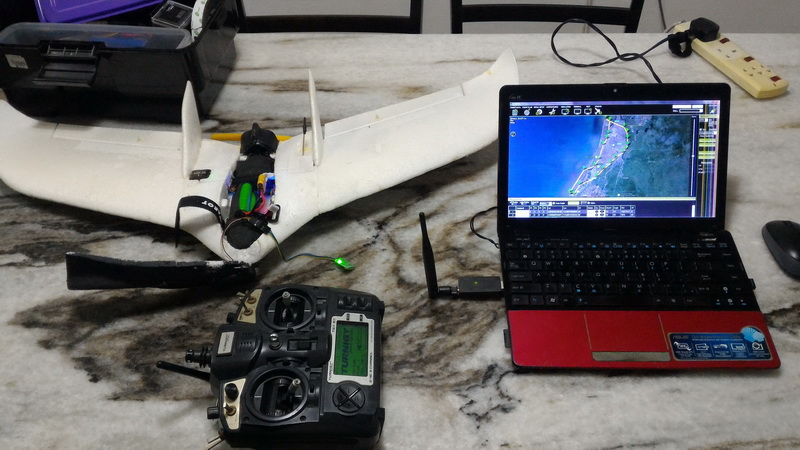
To make all this automation possible a ground computing device needed to communicate 2 ways and send command to the plane. These are:
- Ground telemetry data USB module (3DR radio data telemetry): Radio receiver/transmitter used to connect to smart devices such as smartphone or notebook.via USB. Usually this module mounted over camera tripod for good radio height dispersion.
- Smartphone (Android), tablet or notebook: Needed 3DR/APM Mission planner (Tower or Droid Planner for Android phones/tablet) software as user interface to link/interact with the UAV aircraft model via Radio telemetry USB port
- (*Opt to connect to computing devices for extra manual control if needed instead of using aircraft model radio controller.
To sum up everything above, the pilot does nothing just sit down, relax and watch the show. Almost the same thing what military grade drone do i guess. Dejavu?..yeah its the same list you've read from other page.

Latest Log:
(updated: 30/3/2018)
- Collection of various performance and efficiency data have been introduce by C.Young from rcgroups.com community can be viewed and access at Google documents hub here: https://docs.google.com/spreadsheets/d/e/2PACX-1vTcA_7o-YoGD8KCcCtUGLHTTByQaGvhq4FCFQh3NviR2MyVQ494EfblhcMBUO3qRb5-cTEXtLWJqupf/pubhtml
(updated: 14/8/2017)
- Z-84 V3 was born on early month of July 2017 and made its first mission flight 42km on 31 July 2017 and progressing towards 50km up to 56km as shown on my youtube channel. Passed and survived all challenging wet weather flight just like V2+ does. Originally runs on SANYO NCR18650GA li-on battery but due to poor capacity and soggy (A) Amp performance after 56km mission it was no longer used and now switched back to legendary LG INR18650MJ1 li-on.
(updated: 8/9/2016)
- The Z-84 V2 have been upgraded to Z-84 V2+ (V2 PLUS) because of additional 1+ cell Li-on battery (4S = 16.4V) to increase the thrust and endurance thus reduce power/current draw (A) consumption via lower throttle taking advantage of extra volt increase per-RPM on the motor. Some weight reduction have been done to compensate additional battery weight. The V2+ have total flying weight of 430gram. The V2+ have successfully flown over 63KM distance with these new upgrade and have extra power to spare for extra mileage. The connection schematics is different than V2, in V2+ build RUNCAM HD camera no longer powered from 12A ESC's internal BEC due to rise of temperature on 4S Li-On setup. So the RUNCAM HD feed from main external standalone BEC which also used by other components.
(updated: 22/8/2016)
- The 3rd UAV Wing Wing Z-84 is now building in progress after the success for V2 build. Will be build as ultra long range flight beyond 70km flight range which is 2x fold performance of V2. Have the same setup as V2 with 30% lighter build and extra 140gram weight carrying capacity for extra Li-on battery. The V4 also in plans build for aerial 2D/3D mapping have same build as V2 flown without forward camera but instead equiped special PWM triggered downwards 16MP camera from APM's A* trigger signal port. This will replace Drifter Ultralight V5 previous role as aerial 2D/3D mapper.

Summary
To be honest to myself i never felt so happy to finally found the mos t ideal fixed wing drone that can perform extra ordinary flight performance despite being small and tiny size in the world of UAV autonomous robotic flight. This is my best 2016 build i ever had. Its has all the best thing a person wanted to have a perfect all in one long range flying fixed wing drone flown with minimal amount of power and fly by itself with a press on a button. The Z-84 is small, portable, ultra lightweight, can be a great backpack drone or hand carry everywhere, cost appproximately USD$290 to built, has simple schematics assembly, uses small cheap DIY battery, mount any camera i want, launch and land anywhere i want, fly anywhere i want at any range, very stealthy in the sky and equipped with load of autonomous automation direct on your smartphone via APM/ARDUPLANE software/apps...this is awesome. I also save money from buying FPV equipment since this little guy will do its flight by itself while i go around enjoy my day at cafe or other daily chores until the plane returns home from mission...or eating chicken wing at nearby KFC restaurant...btw we have that all over places...and Mc Donalds. Now that's what i call a real use of drone technology. About safety? Hah! its just too small to cause any problem especially with
t ideal fixed wing drone that can perform extra ordinary flight performance despite being small and tiny size in the world of UAV autonomous robotic flight. This is my best 2016 build i ever had. Its has all the best thing a person wanted to have a perfect all in one long range flying fixed wing drone flown with minimal amount of power and fly by itself with a press on a button. The Z-84 is small, portable, ultra lightweight, can be a great backpack drone or hand carry everywhere, cost appproximately USD$290 to built, has simple schematics assembly, uses small cheap DIY battery, mount any camera i want, launch and land anywhere i want, fly anywhere i want at any range, very stealthy in the sky and equipped with load of autonomous automation direct on your smartphone via APM/ARDUPLANE software/apps...this is awesome. I also save money from buying FPV equipment since this little guy will do its flight by itself while i go around enjoy my day at cafe or other daily chores until the plane returns home from mission...or eating chicken wing at nearby KFC restaurant...btw we have that all over places...and Mc Donalds. Now that's what i call a real use of drone technology. About safety? Hah! its just too small to cause any problem especially with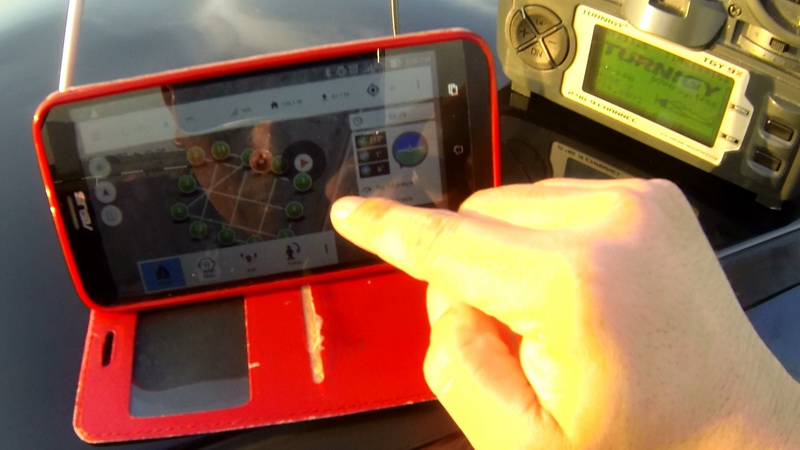 minimal weight of 390gram full flying foamy with its weak tiny power plant...awesome worry free little plane, trust me its safer than getting hit by a tennis ball or a basket ball or maybe a soccer ball....ok ok it fell like getting hit by a your morning newspaper with crossword puzzle in it, lol. Plus this small park size plane won't trigger any red flag among public and authority alike, they might be thinking you're doing slope soaring, line of sight flying for fun but once you pull out those tiny camera and put on it surely will put down those pro level drone UAV pilot to shame...and here you go little UAV plane kicked your big overprice FPV/drone/UAV plane asses. Just in-case if you do lost your plane in the forest, bushes or somewhere you got your radio telemetry data to detect the down plane location all on your smartphone...now that's super cool worry free thing. On the side note at the time of writing this article there are actually 2x more autonomous Wing Wing Z-84 was build in my hangar the V3 and V4. The V3 build expected aim for extremely long range flight twice of what V2 is capable of and the V4 is designed for 2D/3D aerial mapping works just like roughly what Drifter #3 V5 did previously as shown in past video. So if you have that poor tiny Z-84 sitting in garage for years its time to wipe off the dust from its wing and give 'em a new second life. Its a tiny wing of miracle!
minimal weight of 390gram full flying foamy with its weak tiny power plant...awesome worry free little plane, trust me its safer than getting hit by a tennis ball or a basket ball or maybe a soccer ball....ok ok it fell like getting hit by a your morning newspaper with crossword puzzle in it, lol. Plus this small park size plane won't trigger any red flag among public and authority alike, they might be thinking you're doing slope soaring, line of sight flying for fun but once you pull out those tiny camera and put on it surely will put down those pro level drone UAV pilot to shame...and here you go little UAV plane kicked your big overprice FPV/drone/UAV plane asses. Just in-case if you do lost your plane in the forest, bushes or somewhere you got your radio telemetry data to detect the down plane location all on your smartphone...now that's super cool worry free thing. On the side note at the time of writing this article there are actually 2x more autonomous Wing Wing Z-84 was build in my hangar the V3 and V4. The V3 build expected aim for extremely long range flight twice of what V2 is capable of and the V4 is designed for 2D/3D aerial mapping works just like roughly what Drifter #3 V5 did previously as shown in past video. So if you have that poor tiny Z-84 sitting in garage for years its time to wipe off the dust from its wing and give 'em a new second life. Its a tiny wing of miracle!

Videos/Medias![]()
Here are some of my video and gallery related to the above topics:
- Gallery: UAV - Wing Wing Z-84 - 845mm
- My Youtube channel: 3DXL
- My Videos:
- 72.6km Attack of Rain Goddess- Mini UAV Wing Wing Z-84 (Hardcore Edition)
- 63km Epic Journey - Mini UAV Wing Wing Z-84 second build (V2+)
- 56km Storm Ahead -Hardcore Edition- UAV Wing
- 52km Puffy Misty Land - UAV Wing Wing Z-84 V3.0 Ardupilot
- 51km Mission River's End - mini UAV drone Wing Wing Z-84 V3.0 (Ardupilot / APM)
- 51.5km Outlander - UAV Wing Wing Z-84 V3.0
- 50km Lagoon - UAV Wing Wing Z-84 V3.0 Ardupilot
- 50km Northen Beach - UAV Wing Wing Z-84 V3.0
- 50km Route Fifty - UAV Wing Wing Z-84 V3.0
- 50km North Side - UAV Wing Wing Z-84 V3.0
- 50km Beach Stroll - UAV Wing Wing Z-84 V3.0 Ardupilot
- 50km River Trip - UAV Wing Wing Z-84 V3.0 Ardupilot
- 49km Going East - UAV Wing Wing Z-84 V3.0 Ardupilot
- 46km Highway Patrol - UAV Wing Wing Z-84 V3.0 Ardupilot
- 46km Uncharted Territory - UAV Wing Wing Z-84 V3.0
- 46km Horizon Sunrise - UAV Wing Wing Z-84 V3.0 Ardupilot
- 45km Clear Day Flight - UAV Wing Wing Z-84 V3.0 Ardupilot
- 45km Green land adventures - UAV Wing Wing Z-84 V3.0 Ardupilot
- 45km King Tide season - UAV Wing Wing Z-84 V3.0
- 42km Sunrise Patrol - UAV Wing Wing Z-84 V3.0
- 42km Sister three - UAV Wing Wing Z-84 V3.0
- 40km Townsville - UAV Wing Wing Z-84 V3.0 Ardupilot
- 54km Off-shore- Mini UAV Wing Wing Z-84
- 52.1km To the Edge - Mini UAV Wing Wing Z-84 second build
- 43.7km Deep forest - Mini UAV Wing Wing Z-84 second build
- 38km Sunrise Survey - UAV Wing Wing Z-84 V3.0
- 31km Cold valleys - Mini UAV Wing Wing Z-84 using Li-On (LG MJ1 18650)
- 27km City Day - Mini UAV Wing Wing Z-84 using Li-On (LG MJ1 18650)
- 22.2km Urban Patrol - Mini UAV Wing Wing Z-84 using Li-On (LG MJ1 18650)
- 20.4km River stroll - Mini UAV Wing Wing Z-84 using Li-On (LG MJ1 18650)
- 16.8km Windy shore - Mini UAV Wing Wing Z-84 using Li-On (LG MJ1 18650)
- Grid Test Beta - UAV Wing Wing Z-84
Shopping list
Here i've listed some raw material, hardware and stuff where you can start building your own UAV autonomous platform. The list contain the above hardware and also include some compatible ones which you can pickup what suits best for your need and your budget. So come dig around and start your autonomous flying ambition:
** Take note the one with marked (*) is the default 'exact' hardware i use on my version 2 build/setup while the non ones are just compatibles.
- Platform/Airframe:
- Radio set + combo receiver and transmitter module:
- ESC:
- BEC:
- Motor:
- Prop and collet:
- Servo (Need 2x unit):
- HD camera:
- Flight controller (APM):
- Lightweight GPS module for APM:
- OSD module (Optional for FPV setup only):
- Radio data telemetry unit (APM/Pixhawk series): Ground station unit (Android/tablet/smartphone):
- Video transmitter (Optional for FPV setup only):
- Skyzone Upgrade TS5828S 40CH 5.8G 600MW RP-SMA Female FPV Transmitter
- Skyzone Upgrade TS5823S 40CH 5.8G 200MW AV Transmitter Module RP-SMA Female
- Skyzone TS58400 5.8G 400mW 32CH AV Transmitter Module
- Boscam FPV 5.8G 200mW AV Wireless Transmitter TS351
- Boscam FT953 5.8G 400mw 32CH Mini FPV AV Transmitter
- Video receiver/FPV LCD/FPV video goggle (Optional for FPV setup only):
- Boscam GS923 FPV 5.8G 32CH Div AIO Wireless Video Glasses Without DVR
- Fatshark Dominator V3 FPV Video Goggles Glasses WVGA 720p HDMI 800X480
- Fatshark Fat Shark Dominator HD V2 FPV Goggles Video Glasses Headset
- Skyzone SKY02 SKY02S V3 5.8G 40CH AIO 3D FPV Goggles Only Video Glasses Headset
- Skyzone V2 5.8G 40CH FPV Goggles With Raceband Video Glasses Headset
- Skyzone SKY-700D FPV 5.8G 32CH Diversity 7 Inch TFT Monitor DVR
- Skyzone HD02 40CH 5.8G 7 Inch 1024x600 HD FPV Monitor HDMI With/Without DVR Build in Battery
- Battery:
- *1PC Keeppower LG Chem INR 18650 MJ1 10A 3.6V 3500mAh Battery (I use this to build me 3500mah 3s1p DIY pack, expert and skills build needed )

Building threads/Referral
If you don't know where to begin with i recommend you to start reading some guides, wikis and building tips from popular on-line resources as listed below. You might find me wondering around some popular R/C and FPV/UAV forum below.
- Rcgroups.com FPV forum: Long range UAV Wing Wing Z-84 build (step by step daily build)
- Google spreadsheet Z-84 collection of performance & efficiency data by C.Young at rcgroups community
- Rcgroups.com forum: Wing Wing Z-84 (general discussion)
- http://www.diydrones.com
- 3DR/APM Ardupilot - Arduplane manual
- 3DR/APM Ardupilot - MinimOSD installation guide
- 3DR/APM Ardupilot - Configuring telemetry
- Ardupilot - Plane resources
- 3DR APM mission planner software overview
- 3DR APM Ardupilot download center
- 3DR tower apps for Android. (GooglePlay)
- Droid Planner 2 apps Android. (GooglePlay)
- Droid Planner apps Android. (GooglePlay)
- LG MJ1 18650 Battery Review (3500mAh)
